Solutions
Frameworks
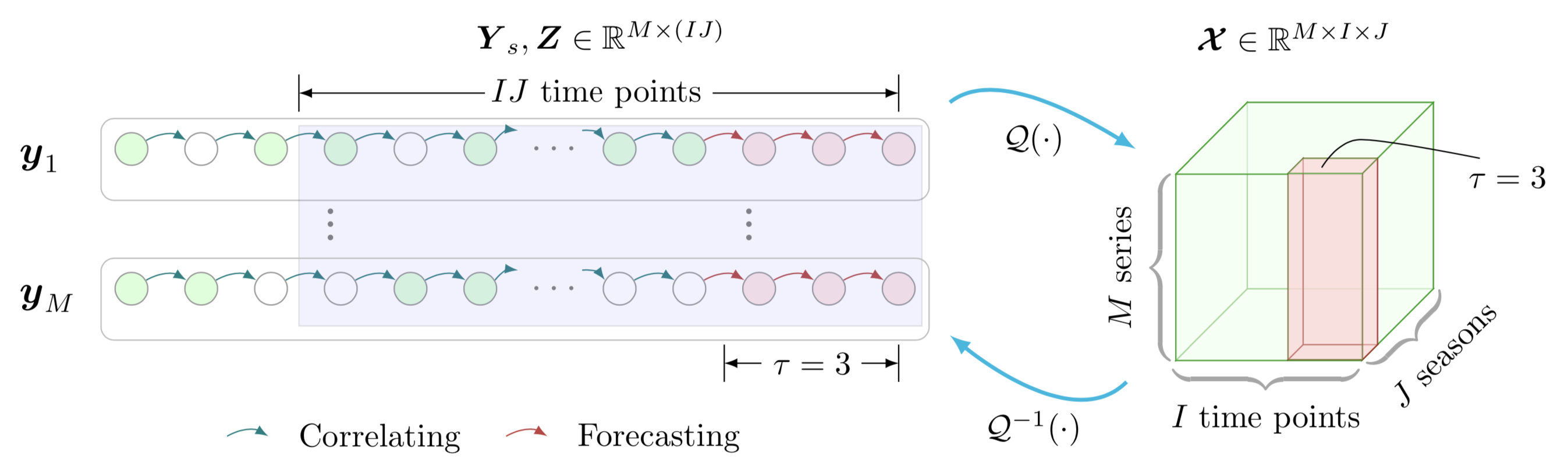
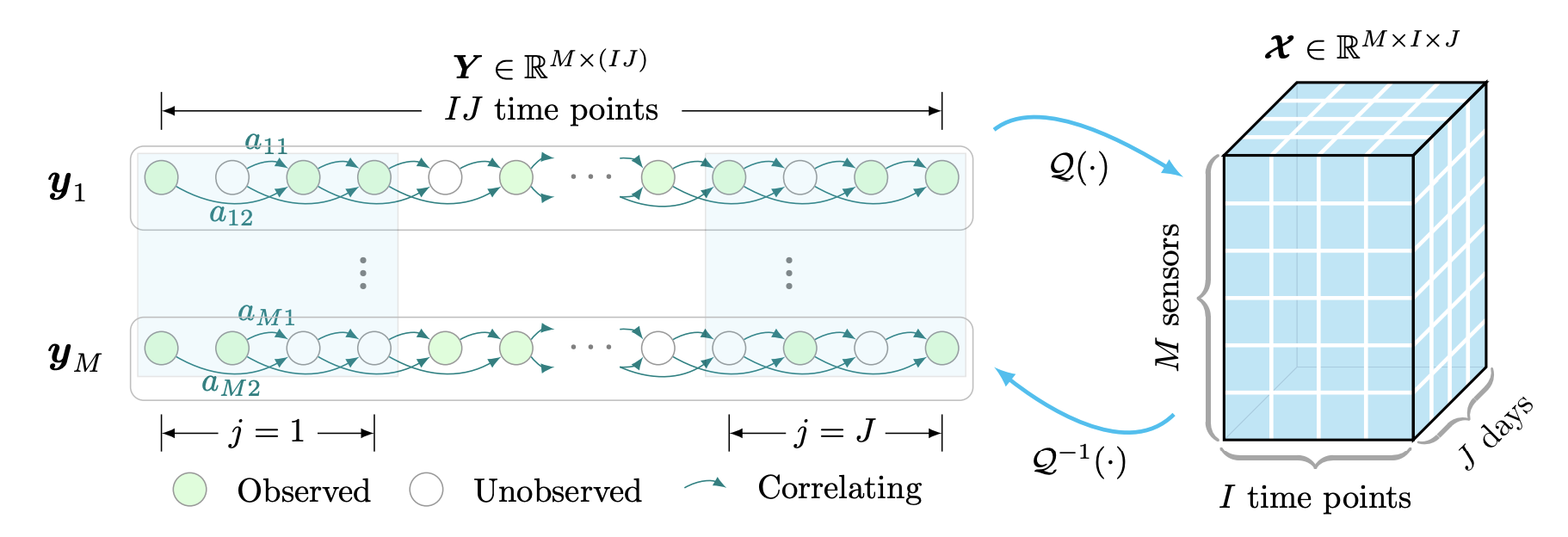
- Low-rank autoregressive tensor completion for multivariate time series prediction:
Algorithms
In what follows, we provide some simple time series imputation and forecasting approaches with Python implementation.
- Multivariate time series imputation
- Multivariate time series forecasting
Low-rank autoregressive tensor completion
The low-rank autoregressive tensor completion model includes two important components, i.e., truncated nuclear norm and time series autoregression:
Below is the Python implementation.
import numpy as np
def ten2mat(tensor, mode):
"""mode = 0,1,2 refer to the mode-1, mode-2, and mode-3 unfoldings, respectively."""
return np.reshape(np.moveaxis(tensor, mode, 0), (tensor.shape[mode], -1), order = 'F')
def mat2ten(mat, dim, mode):
index = list()
index.append(mode)
for i in range(dim.shape[0]):
if i != mode:
index.append(i)
return np.moveaxis(np.reshape(mat, list(dim[index]), order = 'F'), 0, mode)
def svt_tnn(mat, tau, theta):
"""Singular value thresholding algorithm for truncated nuclear norm minimization."""
[m, n] = mat.shape
if 2 * m < n:
u, s, v = np.linalg.svd(mat @ mat.T, full_matrices = 0)
s = np.sqrt(s)
idx = np.sum(s > tau)
mid = np.zeros(idx)
mid[: theta] = 1
mid[theta : idx] = (s[theta : idx] - tau) / s[theta : idx]
return (u[:, : idx] @ np.diag(mid)) @ (u[:, : idx].T @ mat)
elif m > 2 * n:
return svt_tnn(mat.T, tau, theta).T
u, s, v = np.linalg.svd(mat, full_matrices = 0)
idx = np.sum(s > tau)
vec = s[: idx].copy()
vec[theta : idx] = s[theta : idx] - tau
return u[:, : idx] @ np.diag(vec) @ v[: idx, :]
def compute_mape(var, var_hat):
return np.sum(np.abs(var - var_hat) / var) / var.shape[0]
def compute_rmse(var, var_hat):
return np.sqrt(np.sum((var - var_hat) ** 2) / var.shape[0])
from scipy import sparse
def generate_Psi(dim_time, time_lags):
Psis = []
d = np.max(time_lags)
for i in range(len(time_lags) + 1):
row = np.arange(0, dim_time - d)
if i == 0:
col = np.arange(0, dim_time - d) + d
else:
col = np.arange(0, dim_time - d) + d - time_lags[i - 1]
data = np.ones(dim_time - d)
Psi = sparse.coo_matrix((data, (row, col)), shape = (dim_time - d, T))
Psis.append(Psi)
return Psis
from scipy.sparse.linalg import spsolve as spsolve
VAR with ordinary least squares (OLS)
For the vector autoregressive (VAR) model:
Then, the ordinary least squares (OLS) solution is given by
where is required to be non-singular (invertible).
Below is the VAR-OLS algorithm reproduced by using Python.
import numpy as np
def var_ols(X, d):
N, T = X.shape
Y = X[:, d : T]
Z = np.zeros((d * N, T - d))
for k in range(d):
Z[k * N : (k + 1) * N, :] = X[:, d - (k + 1) : T - (k + 1)]
A = Y @ np.linalg.pinv(Z)
return A
VAR with reduced-rank regression (RRR)
The reduced-rank regression solution to the reduced-rank VAR model is given by
where consists of the
eigenvectors corresponding to the
largest eigenvalues of the matrix
.
Below is the VAR-RRR algorithm reproduced by using Python.
import numpy as np
def var_rrr(X, d, R):
N, T = X.shape
Y = X[:, d : T]
Z = np.zeros((d * N, T - d))
for k in range(d):
Z[k * N : (k + 1) * N, :] = X[:, d - (k + 1) : T - (k + 1)]
A_ols = Y @ np.linalg.pinv(Z)
u, _, _ = np.linalg.svd(A_ols @ Z, full_matrices = 0)
Phi = u[:, : R]
A = Phi @ Phi.T @ A_ols
return A
If we have the coefficient matrix trained on the multivariate time series data
, then we can perfrom forecasting on the test data with a certain time horizon. Note that the time horizons
are the time steps that should be forecasted on the test data.
import numpy as np
def var_forecast(X_new, A, d, time_horizon):
N, T = X_new.shape
mat = np.append(X_new, np.zeros((N, time_horizon)), axis = 1)
for t in range(time_horizon):
mat[:, T + t] = A @ mat[:, T + t - np.arange(1, d + 1)].T.reshape(d * N)
return mat[:, - time_horizon :]
Nonstationary time series data
Given the multivariate time series data consisting of
(nonstationary), the differenced time series is the change between consecutive observations in the original time series, and can be written as
The constructed time series is the first-order differencing, usually appears to be stationary [Stationarity and differencing].
def first_diff(X):
X_tilde = X[:, 1 :] - X[:, : -1]
return X_tilde
